Accès rapides
Géoportail cantonal

Le géoportail cantonal (sitn.ne.ch) permet de consulter et analyser plus de 1000 jeux de géodonnées qui décrivent le territoire cantonal.
Les données sont groupées en thèmes : mensuration officielle, routes, environnement, dangers naturels, etc. Le géoportail permet d'obtenir des informations sur les objets (parcelles, bâtiments, altitude, etc.) et fournit une interface simple pour effectuer des analyse géospatiales.
 | Lien vers le géoportail cantonal |
| Lien vers l'aide du géoportail |


























Géoportail LiDAR 3D

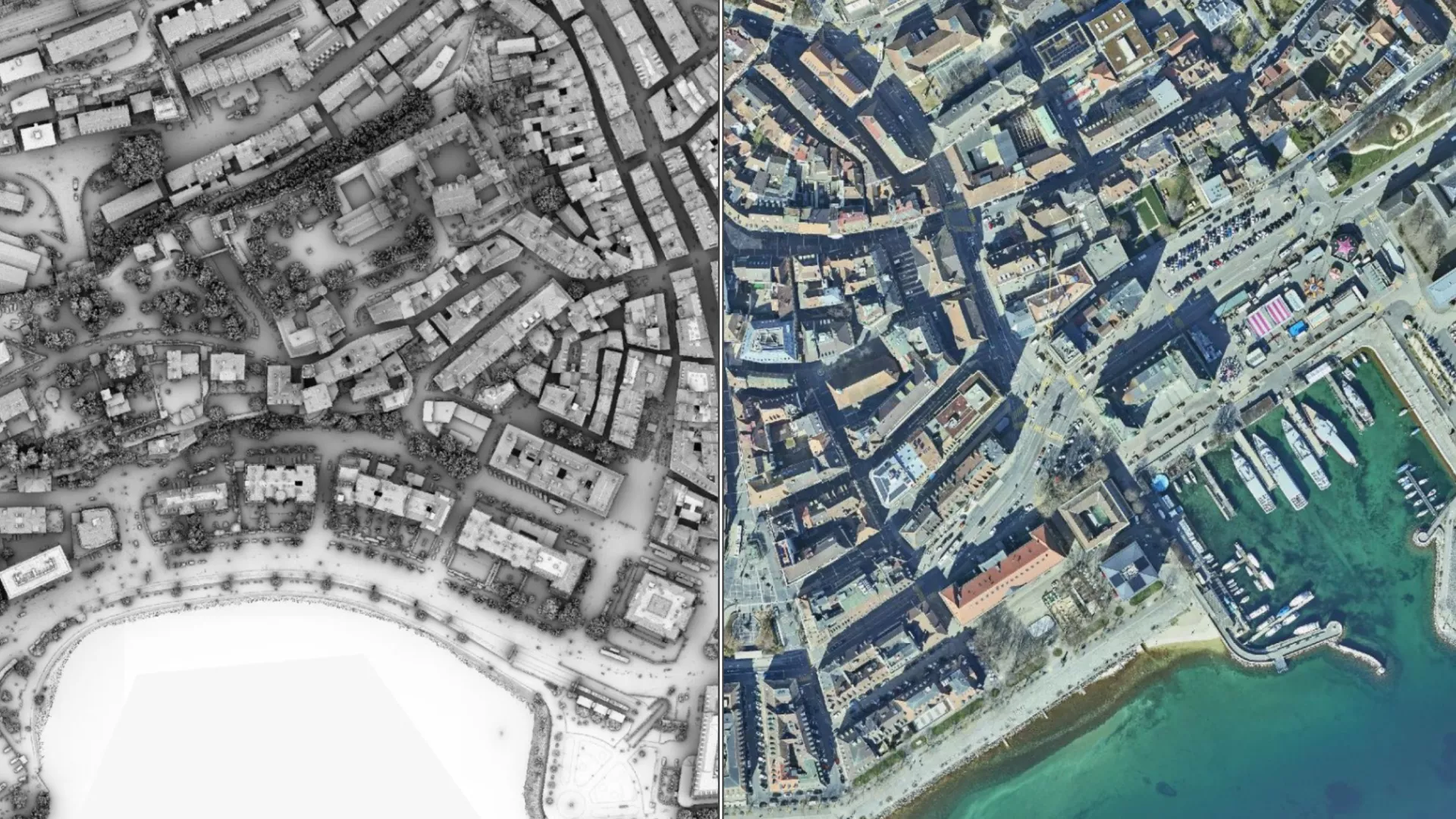
Le géoportail LiDAR (sitn.ne.ch/lidar) fournit un accès direct aux nuages des points LiDAR des différents relevés cantonaux, visualisables en temps réel.
L'outil inclut également des fonctionnalités de profils, de mesures et de colorisation en fonctions des attributs du nuage de points.
| Lien vers le géoportail 3D LiDAR |
Cadastre RDPPF
En Suisse, on dénombre de nombreuses restrictions de droit public à la propriété foncière (RDPPF), très différentes les unes des autres. Elles reposent sur des lois, des ordonnances et des limitations décidées par les autorités, applicables à des parcelles isolées.
Le cadastre RDPPF (sitn.ne.ch/crdppf) est accessible librement via le géoportail cantonal dédié et propose une vue d'ensemble des RDPPF les plus importantes. Il fournit des informations relatives aux huit catégories suivantes : aménagement du territoire, routes, chemins de fer, aéroports, sites pollués, eaux, bruit, forêt, approvisionnement & élimination. Il permet également le télécharger en PDF une vue d'ensemble de toutes les RDPPF affectant une parcelle.
Cartographie climatique
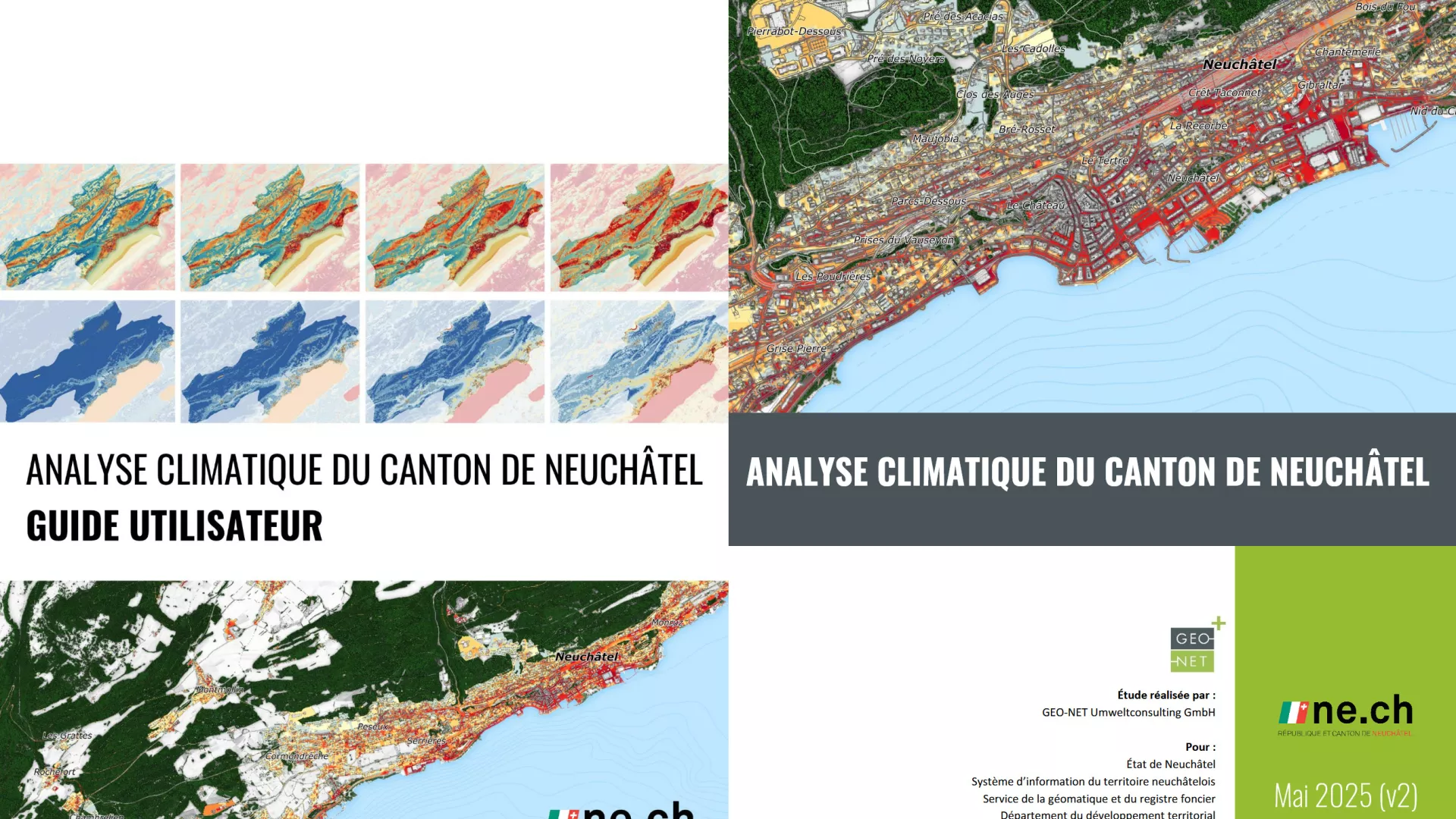
Le Plan Climat du canton de Neuchâtel présente une première série de mesures pour soutenir la dynamique de transition climatique.
Selon la mesure "Localiser et lutter contre les îlots de chaleur", le canton a réalisé la première analyse climatique d’envergure cantonale. Son enjeu est d’anticiper les conditions climatiques auxquelles le canton devra faire face jusqu’à la fin du siècle, suivant les scénarios climatiques de Météosuisse. Les résultats de l’analyse, disponibles sous forme de cartes, couvrent quatre périodes temporelles : 1981-2010 (période de référence), 2020-2049 , 2045-2074 et 2070-2099.
Les résultats montrent l'évolution des températures diurnes et nocturnes ainsi que l'évolution de la température physiologique équivalente (indicateur du stress thermique), mettent en évidence les îlots de chaleur et identifient les principales brises nocturnes. Le service cantonal de l’aménagement du territoire publie également un guide de sensibilisation, avec des propositions d’actions pragmatiques et diversifiées d’adaptation au réchauffement climatique, à l’attention des communes et des planificateurs.
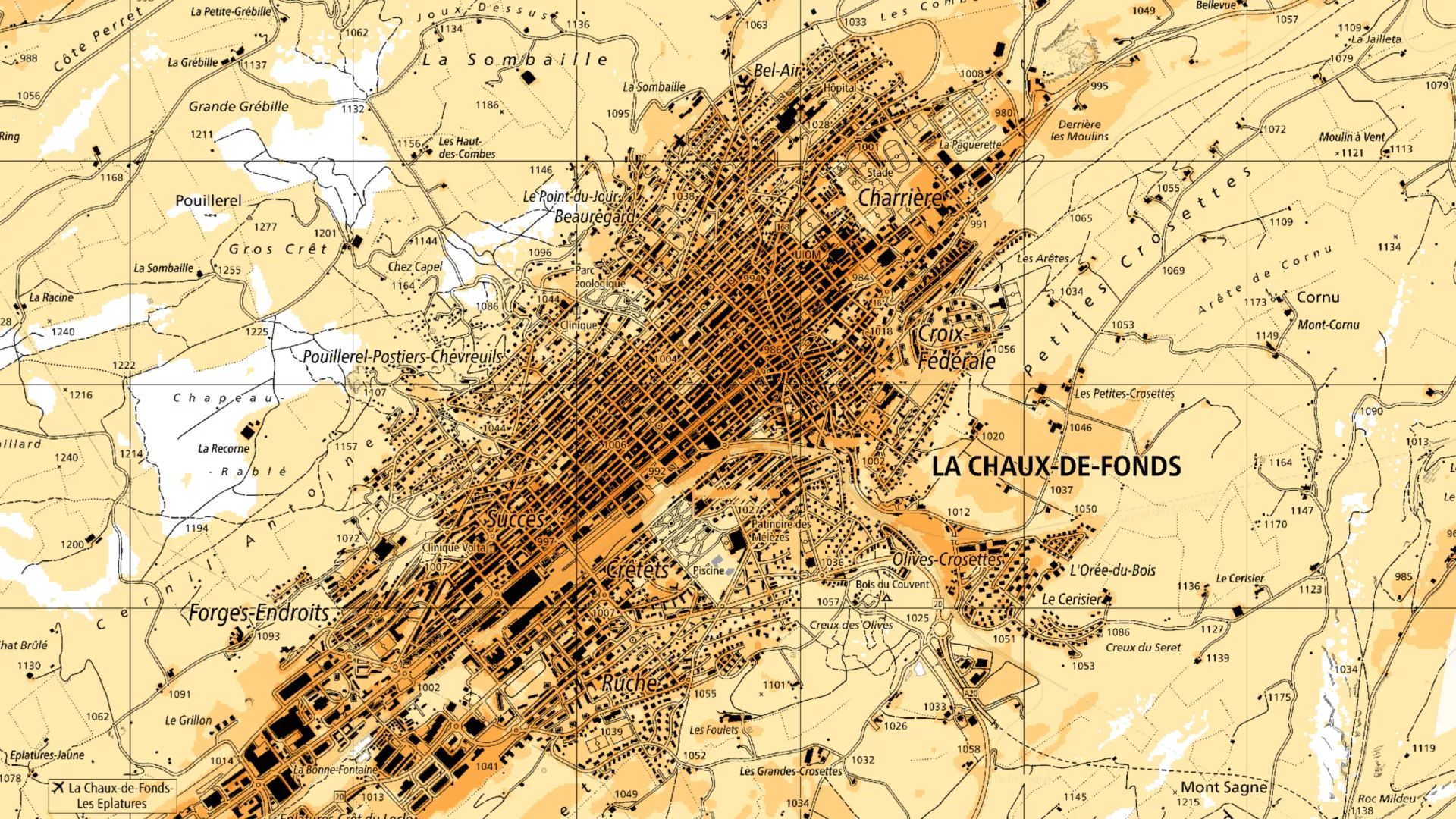
Une hausse des températures est annoncée pour les prochaines décennies dans les quatre régions du canton, en particulier dans les espaces bâtis. Un stress thermique élevé est à prévoir durant les journées d'été les plus chaudes. Le nombre de nuits tropicales va par ailleurs fortement augmenter, concernant une part grandissante des espaces habités. L'étude souligne l'importance de la forêt et des espaces verts, qui offrent des possibilités de rafraîchissement durant la journée et qui atténuent la charge thermique des espaces urbains durant la nuit.
Cette cartographie climatique cantonale s'inscrit dans une démarche globale consistant à créer un jeu de données climatiques cantonales de référence. Ces données, accessibles gratuitement et consultables en ligne, pourront être utilisées dans de nombreuses thématiques afin de prendre en compte l'évolution du climat lors des prochaines décennies.
Atlas statistique et Atlas de la criminalité
L’atlas statistique (atlas.ne.ch) permet d'analyser les données statistiques de manière interactive. Plusieurs centaines de cartes thématiques peuvent être réalisées et combinées entre elles. L'atlas permet aussi d'effectuer des recherches et d'analyser l'évolution temporelle des indicateurs sous forme de cartes, de tableaux ou de graphiques. Vous pouvez télécharger une brochure de présentation de l'application.
L'atlas de la statistique policière et de la criminalité (crimstat.ne.ch) permet d'analyser les activités délictuelles. L'application permet d'étudier l’évolution temporelle des phénomènes sous forme de cartes, de graphiques et de tableaux. Les données sources proviennent de la base de données INFOPOL de la police cantonale. Les données sont saisies dans cette application depuis 2001.
Contact
Système d'information du territoire neuchâtelois |